51Testing软件测试论坛
标题:
细聊HIL测试工作步骤详谈
[打印本页]
作者:
lsekfe
时间:
2023-3-1 10:04
标题:
细聊HIL测试工作步骤详谈
前一段时间做了一个VCU的HIL测试工作,最近在整理整个的调试过程,写了一份总结,在这里和大家分享一下。这里声明一下,这里的内容不做为指导性内容,只是详细讲述一下
测试
过程和心得体会,供大家讨论交流!下面步入正题:
Speedgoat公司:
本人工作中使用的机柜为Speedgoat提供的,这里也简单介绍下这个公司。
Mathworks联营公司,于2006由MathWorks前员工成立
总部位于瑞士伯尔尼,分部门位于Natick(美国波士顿)和德国汉诺威
致力提供专门针对Simulink环境的实时系统
在Mathworks和Speedgoat内,核心团队(仅实时仿真和测试部门)约100人
可能可能 会问,为什么不选择dspace的产品?当然是公司没钱啦。业内有一个调侃:一个公司如果购买HIL设备要走招标流程,那dspace就不来了。。。。。因此他的设备基本上都是比较贵的,招标他肯定没戏。
机柜介绍
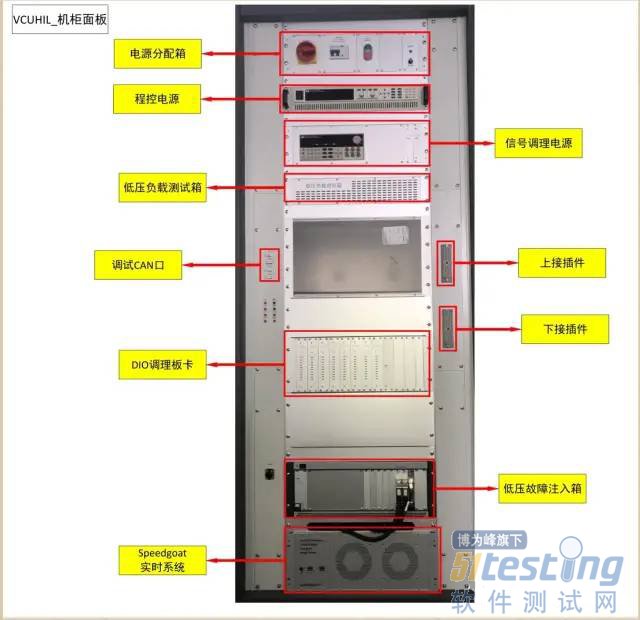
机柜的组成如下图:
1) 电源分配箱:将进入的电力分配给各个模块;
2) 程控电源:提供可控的电力;
3) 信号调理电源:为信号调理提供电力
4) 低压负载测试箱:提供负载电阻
5) 调试CAN口:可进行信号采集和标定
6) 上下接插件:连通机柜与VCU之间的信号交互
7) DIO调理板卡:调理作用
8) 低压故障注入箱:提供故障注入
9) 实时系统:目标机
图1 Speedgoat VCU机柜
对机柜有大致的了解之后就要开始对VCU收发的信号进行定义了,这里需要明白的是,机柜发出和接收信号,都是通过板卡来实现的。我们可以把板卡看作是一个重要的中转,它可以接收到VCU发出来的信号,并通过驱动的配置将其发给目标机,目标机再根据其中的模型执行相应的动作;他也可以将目标机中发出的指令转换成信号发给VCU,从而实现VCU和机柜的信号交互。这里就需要对板卡的资源进行分配和定义。
I/O接口定义和资源分配
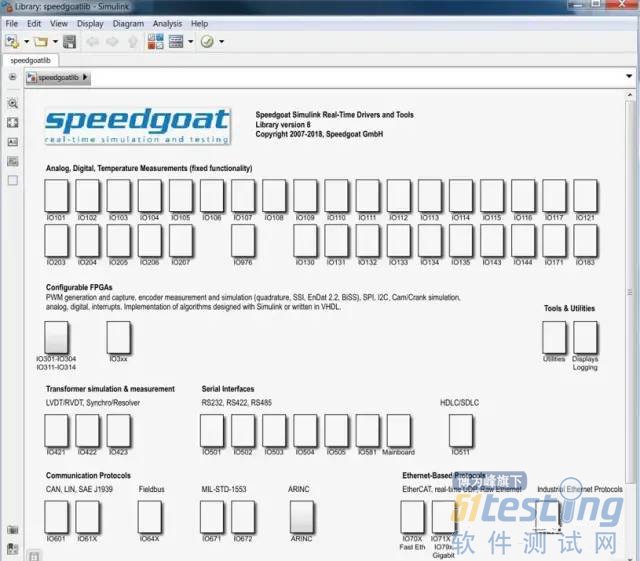
板卡中包含IO133、IO144等多个型号,在模型中使用板卡时,需要利用驱动对其进行管理调配,具体步骤如下:
1.打开Speedgoat提供各板卡的IO驱动库:
方法1:在Simulink库中直接找到该库,可右键打开
方法2:在Matlab窗口输入speedgoatlib
图2 speedgoat提供的模型库
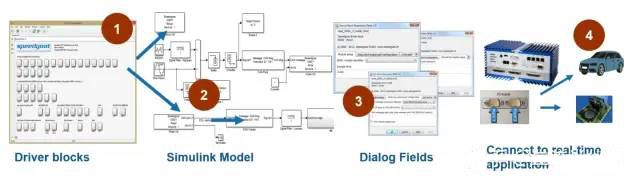
2.板卡驱动的使用
步骤1:将实时目标机具备的IO硬件的驱动模块拖拽到模型中;
步骤2:将算法与IO硬件的驱动模块链接
步骤3:通过对话界面配置IO通道和通讯协议;
步骤4:从Simulink模型自动的创建,并在实时机上运行你的应用
图3 驱动板卡的使用
3.以IO133板卡为例(仅举例,用户需使用自己系统中有的板卡):
步骤1:将setup模块首先拖到模型中,并打开做相应配置,如使用系统中第几块IO133,模拟通道激活那几路(输入方式如[1 2],或[1:4],或[1:3 5]),每路的电压范围(不同板卡有不同设定)。数字通道的方向等(具体可参见setup模块的help说明)
图4 IO133板卡使用
步骤2:将要使用的通道如ADC,DAC模块添加到模型(如果模块的接口没有依据setup的设定自动调整,可Ctrl+D更新一下),并将模块与模型连接即可。
图5 IO板卡添加到模型中
4.接口定义分配
在收到VCU引脚定义后,需对引脚信号进行分类,其收发的信号通常包括Digital Input、Digital Output、Analog Input、Analog Output、PWM Input、PWM Output等类型,因此需要根据各板卡的特性,对各接口进行定义。这里据一个例子进行说明。
板卡的使用电机水泵电源控制,为Digital Output,则需要在板卡里找到Digital Input的接口,将其对应的接插件管脚
记录
下来,并在驱动中完成配置,完成接口定义。如果为Analog Input,还需进行电压等其他配置。
图6 IO133板卡接口
经过DIO的为可自定义的接口,因此若在资源分配中发现某一类型的接口不够用,可以在Digital Input/Output之间相互转换,以便对板卡进行资源分配。
整车环境模型架构
整车环境模型的搭建是一个庞大的工程,里面涉及到车上的各个模块逻辑和相关功能,还需考虑到各模块之间的通讯、信号观测和
自动化测试
等诸多因素,因此在搭建模型是建议参照如下原则。
独立性:将CAN信号、IO信号、控制ECU、硬件模型、环境模型划分模块搭建,混在一起会导致模块混乱、通用性差;
可观测性:提前了解操作平台的可观测属性和可标定属性,在搭建模型时需要有意识的将重要模块的输入信号做Override,输出信号做成可观测量;
适用性:及时了解自动化测试所使用的工具和相关属性,例如TPT只可控制Subsystem的最外层接口,因此需要将集成后的模型再打包成子模型;
便捷性:模块的输出信号和输入信号的顺序,要按照DBC的顺序进行统一,方便后面的修改替换;
检测顺序:
模型搭完后需对模型的正确性、信号收发的正确性和面板控制的正确性等方面进行检测,此过程中的检测步骤如下:
1. 总线检测:通过万用表测量VCU接插件端到机柜板卡端的通断,确保总线的正确性;
2. 板卡功能定义检测:检测板卡的输入信号解析和输出信号发送是否符合板卡定义,例如数字信号定义、模拟信号定义、PWM波信号定义等;
3. 驾驶员控制面板的检测:检测驾驶员控制操作,如油门、踏板、KeyON/Start等;
调试顺序:
检测工作完成后就进入了具体的调试阶段了,在
功能测试
中慢慢发现问题,完善环境模型。在此过程中需遵循从简单基础功能开始测试的原则,逐渐覆盖全功能,具体调试顺序可参考如下:
1. 信号收发调试:完善信号收发必备的LIVECOUNTER 和CHECKSUM的计算;
2. 信号发送的正确性校验:通过CANalyzer或CANape观测报文,并校验信号发送是否正确;
3. 上下电功能调试:根据设计要求,调试上下电功能;
4. 睡眠唤醒调试:根据设计要求,调试睡眠唤醒功能;
5. 充电功能调试:根据设计要求,调试充电功能;
车辆可以正常行驶后,开始对各个功能进行调试,在测试中发现问题,不断优化模型。
欢迎光临 51Testing软件测试论坛 (http://bbs.51testing.com/)
Powered by Discuz! X3.2